╬øŽüÖCŲ„╚╦ėą║▄ČÓĘNŻ¼│ŻęŖĄ─╩Ūė╔ę╗ĮMȵÖC“īäėĄ──ŻĘ┬╬øŽü═Ōą╬║═äėū„Ą─ČÓūį ė╔Č╚ÖCŲ„╚╦Ż¼Ė▀Ję╗³cĄ─ät╩Ūė╔╚¶Ė╔éĆd┴óÖCŲ„╚╦ĮM│╔Ą─Žü╚║Ż¼│╔åTų«ķg╣▓ŽĒą┼ ŽóŻ¼ģf═¼╣żū„ĪŻ▒Š╣ØĮķĮBĄ─╩Ūę╗ĘNŽÓī”▌^ęūīŹ¼FŻ¼įņārę▓▒╚▌^Ą═Ą─╬øŽüÖCŲ„╚╦Ż¼čą Š┐Ą─╩Ū╚ń║╬└¹ė├ļŖ┬Ęśŗįņ║åå╬Ą─╔±ĮøŠWĮjŻ¼ųĖō]ÖCŲ„╚╦Ą─▀\äėĪŻ
╬─╦∙šfĄ─Ī░╔±ĮøŠWĮjĪ▒ųĖĄ─╩ŪMark Tilden╠ß│÷Ą─Neural Network║═ė╔┤╦┼╔╔· │÷üĒĄ─BEAMÖCŲ„╚╦Ż¼ļm╚╗║▄┐╔─▄┤╦Ī░╔±ĮøĪ▒ĘŪ▒╦Ī░╔±ĮøĪ▒,Ą½╩Ū┐╝æ]ĄĮ╔±ĮøŠWĮj ▒Š╔ĒŠ═╩Ū╠Äė┌蹊┐ļAČ╬Ą─ę╗ķT┐ŲīWŻ¼Č°BEAMÖCŲ„╚╦Ą─╔±ĮøŠWĮjėų╩ŪśIėÓŚl╝■Ž┬╔┘ öĄ┐╔ęįīŹ¼FĄ─ĘĮ░Ėų«ę╗Ż¼ę▓Š═ø]╩▓├┤║├▒¦į╣Ą─┴╦ĪŻ
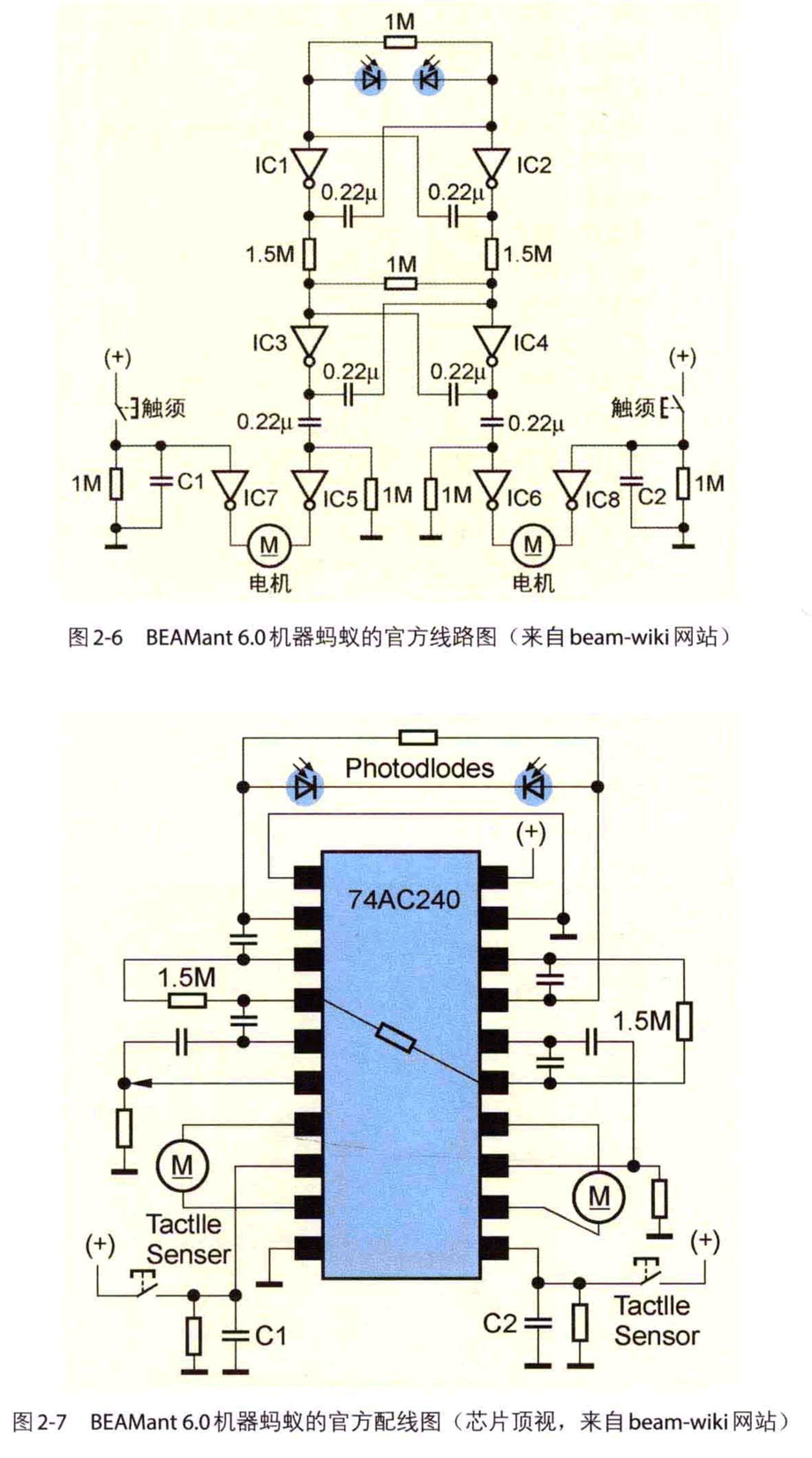
╗∙ė┌╔Ž╩÷╔±ĮøŠWĮjĄ─ÖCŲ„╚╦Ż¼ZĮøĄõĄ─ę¬öĄBEAMant, Å─ūų├µ╔ŽĘŁūg▀^üĒŠ═ ╩ŪÖCŲ„╬øŽüĪŻÖCŲ„╬øŽüŽ╚║¾ėą▀^║▄ČÓéĆ░µ▒ŠŻ¼ę“×ķĢrķgŠ├▀hŻ¼ ę╗ą®įńŲ┌Ą─įOėŗį┌ŠW ╔ŽęčĮøšę▓╗ĄĮ┴╦ĪŻ¼Fį┌beam-wiki (▒╚▌^ÖÓ═■Ą─BEAM ÖCŲ„╚╦ŠWšŠ)╔Ž├µ╠ß╣®Ą─╣┘ ĘĮ░µ▒Š╩ŪMark Tildenį┌1999─ĻįOėŗĄ─BEAMant 6.0,╚ńłD2-6ĪółD2-7╦∙╩ŠĪŻ
Ž┬├µ╩Ūā╔ų╗ÖCŲ„╬øŽüĄ─ųŲū„▀^│╠ĪŻ
▓─ ┴Ž Ż║
>> 74HC240,4 éĆ
>>╣Ō├¶Č■śO╣▄Ż¼2éĆ
>> 0.22”╠F ¤ośOļŖ╚▌Ż¼6éĆ
>>╬óą═ļŖÖCŻ¼2éĆ
>>1M”Ė ļŖūĶŻ¼6éĆ
>>1.5M”Ė ļŖūĶŻ¼2éĆ
>>PC ļŖį┤Č╦ūė(─ĖŻ¼▓ąŠ),2╬╗
>>ąĪą═ē║ŠĆČ╦ūė(▓ąŠ),2╬╗
>> 3mm ³SŃ~╣▄(┐╔▀x),1ąĪČ╬
>>RCA ▓ÕŅ^╬▓╗╔Ż¼1éĆ
>>─ß²łį·Ä¦Ż¼2Ė∙
>>4Ī┴AA ļŖ│žé}Ż¼1éĆ
>>¤ß┐s╣▄Ż¼1ąĪČ╬
>> Č┤Č┤░Õ(īŹļH╩╣ė├4┐ūĪ┴7┐ū),1ąĪēK
>>═©┐ūųķūėŻ¼1Ņw
>> 0.1”╠F¤ośOļŖ╚▌(ļŖÖCŽ¹įļ┬ĢŻ¼┐╔▀x),2éĆ
>> PCÖCŽõ░Õ┐©ō§Ų¼(╗“Ųõ╦¹╠µ┤·▓─┴Ž),2Ų¼
>>ļp├µ─zĦĪó┬▌─ĖĪó┬▌ĮzĪóī¦ŠĆŻ¼▀m┴┐
╣ż Š▀ Ż║
>>└ėĶFĪó║ĖÕa
>> ÅØŅ^Ķćūė
>>ų╣č¬ŃQ
>> Ų½┐┌ŃQ
>>ļŖŃ@Īó M3.2Ń@Ņ^
>> ļŖ┤Ą’L
>>┼_ŃQ
>>╣▄ūėĖŅĄČ
>>õSĄČ(┐╔▀x)
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |