Įėų°ųŲū„ÖCŲ„╚╦Ą─ļŖūė▓┐Ęų
▓─ ┴Ž Ż║
>> NPN ą═ąĪ╣”┬╩╚²śO╣▄Ż¼2éĆŻ¼
>> ╣Ō├¶ļŖūĶ╗“╣Ō├¶Č■śO╣▄Īó╝t═ŌŠĆĮė╩š╣▄Ż¼2éĆ >>5k”Ė ļŖ╬╗Ų„Ż¼2éĆ
>>1N4007,2 éĆ
>>Č┤Č┤░ÕŻ¼1ąĪēKŻ¼ >>▓ÕĮė╝■Ż¼▀m┴┐
>>3.7VõćļŖ│žĪó│õļŖŲ„Ż¼1╠ū
>>ļŖ┬Ę░Õ┴óų∙Ż¼3éĆ ╣ż Š▀ Ż║
>>║Ė┼_Īó║ĖÕa >> Ķćūė
ÖCŲ„╚╦ļŖūė▓┐ĘųĄ─ų„ę¬į¬╝■ĪŻ▀@└’╩╣ė├Ą─╚²śO╣▄╩ŪC1815, ┐╔ęį╠µōQ│╔ļŖ┴„Ė³┤¾Ą─8050,ę▓┐╔ęį╩╣ ė├Ųõ╦¹ą═╠¢Ą─ąĪ╣”┬╩NPN ą═╚²śO╣▄ĪŻõćļŖ│ž│õļŖŲ„ė├ę╗éĆł¾ÅUĄ──”═ą┴_└Ł╩ųÖC│õļŖŲ„(ś╦ĘQ▌ö│÷ 4.4V/1A)Ė─įņČ°│╔

│ŻęŖĄ─Ėą╣ŌŲ„╝■Ż¼Å─ū¾═∙ėęę└┤╬×ķŻ║5mm ╝t═ŌŠĆĮė╩š╣▄Īó5mm ╣Ō├¶Č■śO╣▄Īó╣Ō├¶ļŖūĶ
╝t═ŌŠĆĮė╩š╣▄Ą─╠ž³c╩Ū╣żū„ĘČć·īÆĪóĒææ¬╦┘Č╚┐ņĪŻ│²┴╦┐╔ęŖ╣ŌŻ¼╦³▀Ć┐╔ęįĖąų¬ ╝t═ŌŠĆŻ¼▀@śė─ŃŠ═┐╔ęįį┌║┌░ĄĄ─ŁhŠ│Ž┬ė├ļŖęĢ▀b┐žŲ„(░┤Ž┬╚╬ęŌµI«a╔·ę╗éĆ╝t═Ō╣Ō į┤)üĒųĖō]ÖCŲ„╚╦┴╦ĪŻ
╣Ō├¶Č■śO╣▄╩ŪīŻķTųŲįņĄ─Öz£y╣ŌŠĆĄ─Ų„╝■Ż¼ā׳c╩Ūņ`├¶Č╚║├ĪóĒææ¬╦┘Č╚┐ņŻ¼╚▒ ³c╩ŪārĖ±Ų½Ė▀ĪŻ
╣Ō├¶ļŖūĶ╩Ūę╗ĘNūĶųĄļS╣ŌŠĆÅŖČ╚Ą─į÷╝ėČ°Ž┬ĮĄĄ─╠ž╩ŌļŖūĶŻ¼╠ž³c╩ŪĒææ¬╦┘ Č╚┬²ĪóįņārĄ═ĪŻ╩ął÷╔Ž│ŻęŖĄ─╣Ō├¶ļŖūĶ╩Ūų▒ÅĮ×ķ3mm Ą─3516║═3526,═Ų╦]╩╣ė├ 3526,┴┴Īó░ĄļŖūĶĄ─ūā╗»ĘČć·▒╚3516┤¾ĪŻ
ÖCŲ„╚╦Ą─Ėą╣ŌŲ„╝■Į©ūh┼õī”╩╣ė├Ż¼ęį£p╔┘š{įćŁh╣Ø│÷¼FĄ─å¢Ņ}ĪŻ£yįć░ĄļŖūĶĢr ┐╔ęį░čį¬╝■├▄ĘŌį┌║┌╔½─zŠĒ║ą└’Ż¼╔w╔Ž╔wūėŻ¼ų╗┬Č│÷ā╔Ślę²─_▀Mąą£y┴┐ĪŻ┴┴ļŖūĶ┐╔ ęįį┌╩ęā╚ūį╚╗╣ŌŚl╝■Ž┬£y┴┐ĪŻ
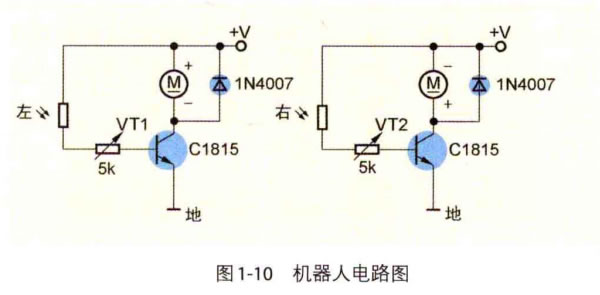
ÖCŲ„╚╦ļŖ┬ĘłD╚ńłD1-10╦∙╩ŠŻ¼▀@éĆļŖ┬Ę┐┤ŲüĒĘŪ│Ż║åå╬Ż¼╝ė╔ŽļŖÖCŻ¼ ę╗╣▓ų╗ėą 10éĆį¬╝■Ż¼Å─ļŖ┬ĘĮŪČ╚Ęų╬÷Ż¼▓╗▀^Š═╩Ūę╗ī”╣ŌļŖķ_ĻP┐žųŲā╔éĆļŖÖCŻ¼▒╦┤╦╗ź▓╗Ė╔ ö_ĪŻĄ½╩Ū░čš¹éĆļŖ┬Ę░▓čbį┌ę╗éĆ┐╔ęį╗ŅäėĄ─Ąū▒P╔ŽŻ¼ŪķørŠ═Ģ■┤¾▓╗ę╗śėĪŻ
ļŖ┬ĘĄ─īŹļH▀\ąąą¦╣¹╩Ū░čÖCŲ„╚╦Ėąų¬ĄĮĄ─╣ŌŠĆ▐DōQ│╔├}ø_Ż¼“īäėļŖÖC▀\▐DŻ¼ļŖ ÖCĄ─▀\▐DĢrķg╚ĪøQė┌├}ø_Ą─│ų└mĢrķgĪŻ▀@╩Ūę╗éĆ├¹Ė▒ŲõīŹĄ─╣Ō-ÖC-ļŖę╗¾w╗»ŽĄĮyŻ¼é„ ĖąŲ„(╣Ō├¶ļŖūĶ)║═ł╠ąąŲ„(ļŖÖC)Ą─╬’└Ē▓╝ŠųøQČ©┴╦ÖCŲ„╚╦Š▀ėąīż╣Ō╠žąįĪŻ
▀@éĆŽĄĮyĄ─┴Ēę╗éĆ╠ž³c╩Ūā╔éĆł╠ąąŲ„ŽÓī”d┴óĪŻ┼e└²üĒšfŻ¼ÖCŲ„╚╦ū¾č█ĖąėXĄĮ ▌^ÅŖ╣ŌŠĆŻ¼Ģ■╩╣▄ć¾wŽ“ū¾▐DŻ¼╣Ōį┤(ŽÓī”▄ć¾w)ėęęŲŻ¼ą┼Žó┴„äėĄ─Ēśą“╩Ūū¾č█ Ī· ╚² śO╣▄VT1Ī· ėęļŖÖC Ī· ▄ć¾w Ī· ╣Ōį┤ Ī· ėęč█ Ī· ╚²śO╣▄VT2Ī· ū¾ļŖÖCĪŻė╔┤╦┐╔ęį┐┤│÷Ż¼ā╔ éĆł╠ąąŲ„ų«ķgĄ─Ī░ķgĖ¶Ī▒▒╚▌^Ī░▀hĪ▒,▄ć¾w║═╣Ōį┤│╔┴╦╦³éā£Ž═©ą┼ŽóĄ─├ĮĮķĪŻ▀@ĘN Ūķørįņ│╔Ą─ą¦╣¹╩ŪÖCŲ„╚╦Ą─äėū„▒╚▌^ÖCąĄŻ¼ąą±é▄ē█E│╩ų«ūųą╬╗“┬▌ą²ą╬ĪŻ
ū„×ķę╗▓┐ų╗ėą10éĆį¬╝■Ą─īż╣ŌÖCŲ„╚╦Ż¼ą¦╣¹┐╔ęįšfŽÓ«ö▓╗Õe┴╦ĪŻÖCŲ„╚╦Š▀ėą│» Ž“╣ŌŠĆZÅŖģ^ė“ęŲäėĄ─╠žąįŻ¼ė├╔·╬’īWągšZ├Ķ╩÷Š═╩ŪŠ▀ėąĪ░│»Ž“┌ģąįĪ▒ĪŻ┤¾ČÓöĄ└ź ŽxŅ^▓┐Č╝ėąę╗ī”Ėą╣ŌŲ„╣┘Ż¼┐╔ęįų▒Įė▒╚▌^ā╔é╚╣ŌŠĆĄ─ÅŖČ╚Ż¼▀MČ°š{š¹ąą▀MĘĮŽ“Ż¼Å─ ▀@ę╗³cüĒ┐┤Ż¼ÖCŲ„╚╦Ą─ĮYśŗę▓ĘŪ│ŻĘ┬╔·ĪŻ
ūó1:▓╗Ė─ūāļŖ┬ĘŻ¼ų╗ąĶ░čÖCŲ„╚╦Ą─Ėą╣ŌŲ„╝■╗“ļŖÖCū¾Īóėęš{ōQéĆ╬╗ų├Ż¼Š═┐╔ ęįūī╦³ī”╣Ō│╩Ę┤Ž“┌ģąįĪŻ▀@śė╦³Š═│╔┴╦ę╗▓┐▒▄╣ŌÖCŲ„╚╦ĪŻ
ūó2:╚ń╣¹╩╣ė├╣Ō├¶Č■śO╣▄╗“╝t═ŌĮė╩š╣▄Ż¼ąĶę¬░č╦³éāĘ┤Ž“Įė╚ļļŖ┬ĘŻ¼╝┤╣▄ūė žōśO▀BĮė+V, š²śOĮø5kQļŖ╬╗Ų„▀BĮė╚²śO╣▄╗∙śOĪŻ╩╣ė├▓╗═¼▓─┴ŽĄ─Ėą╣ŌŲ„╝■Ż¼ÖC Ų„╚╦Ą─ąą×ķ─Ż╩Įę▓Ģ■ėą╦∙▓╗═¼ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |