Ž╚─Ńę¬ė├╚╦╣ż▓─┴ŽųŲū„▀@śėę╗▓┐ÖCŲ„╚╦Ż║╦³┐╔ęįūįė╔╗ŅäėŻ¼┐╔ęįĖą╩▄ĄĮ╣ŌŻ¼ ┐╔ęįī”╣Ōū÷│÷Ę┤æ¬Ż¼╝┤ųŲū„ę╗▓┐Š▀ėąīż╣Ō╣”─▄Ą─ąĪą═ū└├µ╩ĮÖCŲ„╚╦ĪŻ─ŃĢ■░l¼F╦³ĘŪ │Ż║åå╬Ż¼Ą½╩Ū┬ķ╚ĖļmąĪŻ¼╬Õ┼KŠŃ╚½Ż¼╦³░³║¼┴╦ÖCŲ„╚╦╦∙▒žąĶĄ─3┤¾▓┐╝■Ż║é„ĖąŲ„Īó ┐žųŲŲ„║═ł╠ąąŲ„ĪŻ
īż╣ŌÖCŲ„╚╦╩ŪZŠ▀┤·▒ĒąįĄ─Ę┬╔·ÖCŲ„╚╦ĪŻÖCŲ„╚╦Ą─īż╣Ō╠žąįė├╔·╬’īWągšZ├Ķ╩÷ Š═╩ŪĪ░┌ģ╣ŌąįĪ▒ĪŻ┤¾ČÓöĄ╔·╬’Ż¼░³└©äė╬’║═ų▓╬’Č╝Š▀ėą┌ģ╣ŌąįŻ¼▀Ćėąę╗ą®╔·╬’ī”╣Ō Š▀ėąĘ┤Ž“┌ģąį(žō┌ģ╣Ōąį╗“┌ģ░Ąąį),▒╚╚ń╔·╗Ņį┌═┴╚└ųąĄ─¤o╝╣ūĄäė╬’ĪŻ
╔·╬’Ą─┌ģ╣Ōąį┐╔ęįūĘ╦▌ĄĮę╗ĘNÅ─╩ĘŪ░Š═┤µį┌Ą─╔·╬’Ī¬Ī¬║ŻąŪĪŻ║ŻąŪ├┐ų╗═¾ūŃ (▀\äėŲ„╣┘)Ą──®Č╦Č╝ėąę╗éĆ╝t╔½Ą─č█³c(Ėą╣ŌŲ„╣┘)ĪŻ
▀@ā╔ĘNŲ„╣┘Č╝┐╔ęįė├╚╦╣ż▓─┴Ž║═¼F┤·╝╝ągüĒ─ŻöMŻ¼▓óŪę┐╔ęįį┌śIėÓÉ█║├š▀Ą─╣żū„┼_╔ŽīŹ¼FĪŻ Ž┬├µķ_╩╝ųŲū„ÖCŲ„╚╦Ą─╔Ē¾wĪŻ╔Ē¾w╩Ūę╗éĆė╔ā╔éĆļŖÖC“īäėĄ─┐╔ęįūįė╔╗ŅäėĄ─ąĪ ▄ć╩ĮĄū▒PĪŻ╔Ē¾wŽÓ«öė┌ÖCŲ„╚╦Ą─╣Ū╝▄Ż¼ÖCŲ„╚╦Ą─é„ĖąŲ„║═┐žųŲŲ„Č╝┤Ņ▌dį┌╦³╔Ž├µĪŻ ▄ć▌å║═ļŖÖCśŗ│╔┴╦ÖCŲ„╚╦Ą─▀\äėŲ„╣┘ĪŻ
▓─ ┴Ž Ż║
>>ĮŪĶFŻ¼1ēK
>>▄ć▌åĪóļŖÖCŻ¼2╠ū
>>╔wą╬┬▌├▒Ż¼1éĆ
>>M6┬▌ĮzĪó┬▌─ĖŻ¼1╠ū >>─ß²łį·Ä¦Ż¼4Ė∙
╣ż Š▀ Ż║
>>┼_Ń@
>>┬▌ĮzĄČ
>>ŲĮ┐┌ŃQ
>>Ų½┐┌ŃQ
ÖCŲ„╚╦▄ć¾wųŲū„▓─┴Ž╚ńłD1- 1╦∙╩ŠĪŻī”┤¾ČÓöĄÉ█║├š▀üĒšfŻ¼ę“×ķ╚▒╔┘║Ž▀mĄ─▓─ ┴Ž║═╣żŠ▀Ż¼ÖCŲ„╚╦╣Ū╝▄▓┐ĘųĄ─ųŲū„ę╗ų▒╩Ūę╗éĆ▒╚▌^└¦ļyĄ─Łh╣ØĪŻį┌ųŲū„▀@▓┐ÖCŲ„╚╦ ĢrŻ¼╬ęę▓├µ┼R═¼śėĄ─ŪķørĪŻę“×ķZĮ³╣żū„╩ę░ß╝ęŻ¼ŲĮĢrė├ų°Ēś╩ųĄ─▓─┴ŽČ╝┤“░³ĘŌ┤µ ┴╦Ż¼ų╗─▄╩╣ė├╩ų▀ģ┼RĢr╦č┴_ĄĮĄ─ę╗ą®▓─┴ŽĪŻ
ļŖÖC║═▄ć▌å╩Ū╩ął÷╔Ž│ŻęŖĄ─ą═╠¢Ż¼į┌ŠW╔Ž╚╬║╬ ę╗ ╝ęÖCŲ„╚╦┴Ń╝■ĄĻ└’Č╝┐╔ęįšę ĄĮŻ¼Äū║§╩Ūć°ā╚ÖCŲ„╚╦─Żą═Ą─ś╦┼õäė┴”▓┐╝■ĪŻĮŪĶF╩Ūčbą▐Ģr┴¶Ž┬Ą─Ż¼▓╗ų¬Ą└Z│§ ė├į┌──└’Ż¼┐╔─▄╩Ūė├üĒĄ§čb│ķė═¤¤ÖCĄ─ś╦£╩╝■ĪŻ╔wą╬┬▌├▒╩Ūūįąą▄ć╔ŽĄ─┼õ╝■ĪŻ M6 ┬▌ĮzĪó┬▌─Ė╩ŪÅ─╔ó┴ŽČč└’╠¶│÷üĒĄ─Ż¼š²║├┐╔ęį┤®▀^ĮŪĶF╔ŽĄ─▓█┐┌Ż¼į┌─®Č╦╣╠ Č©╔wą╬┬▌├▒ĪŻ
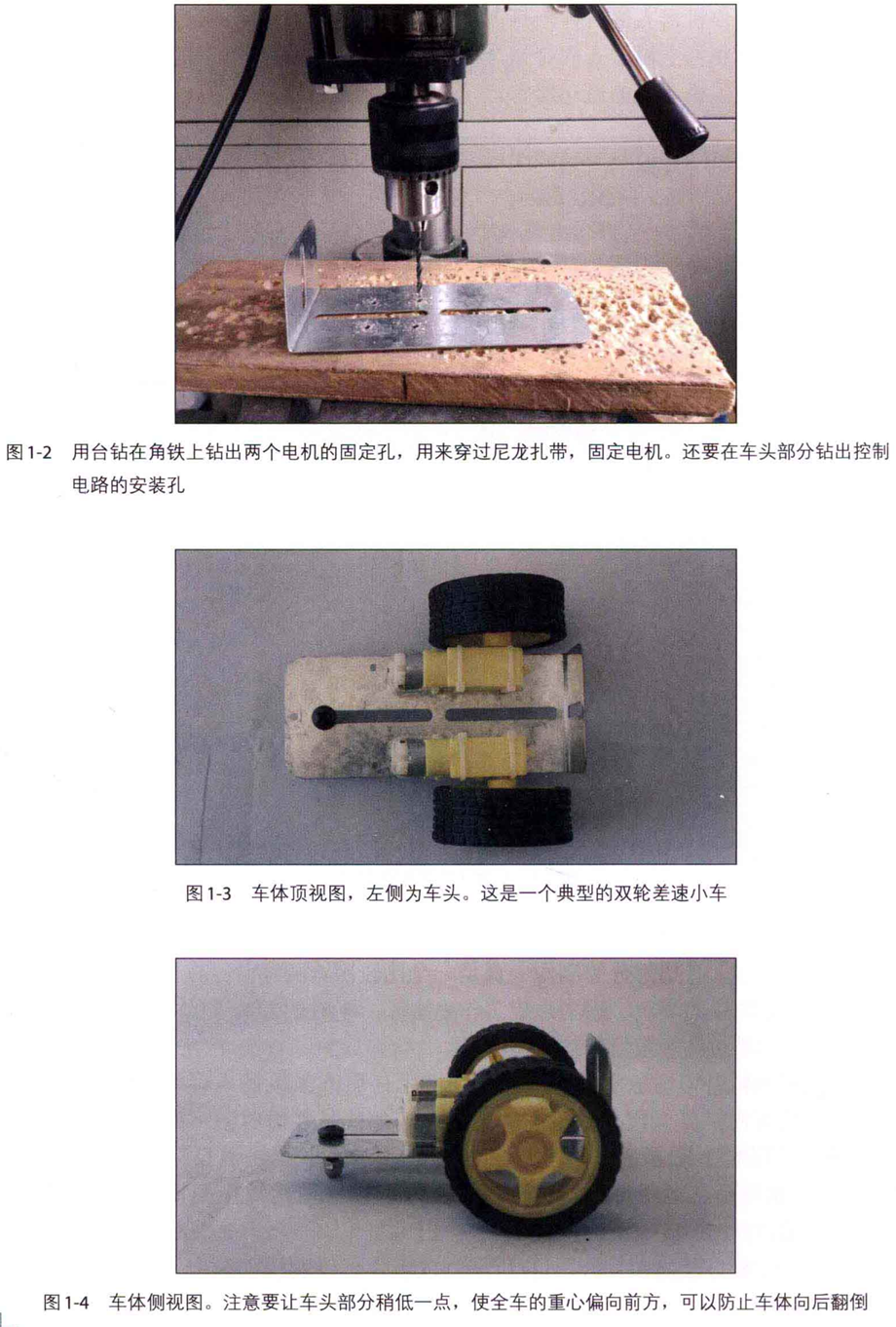
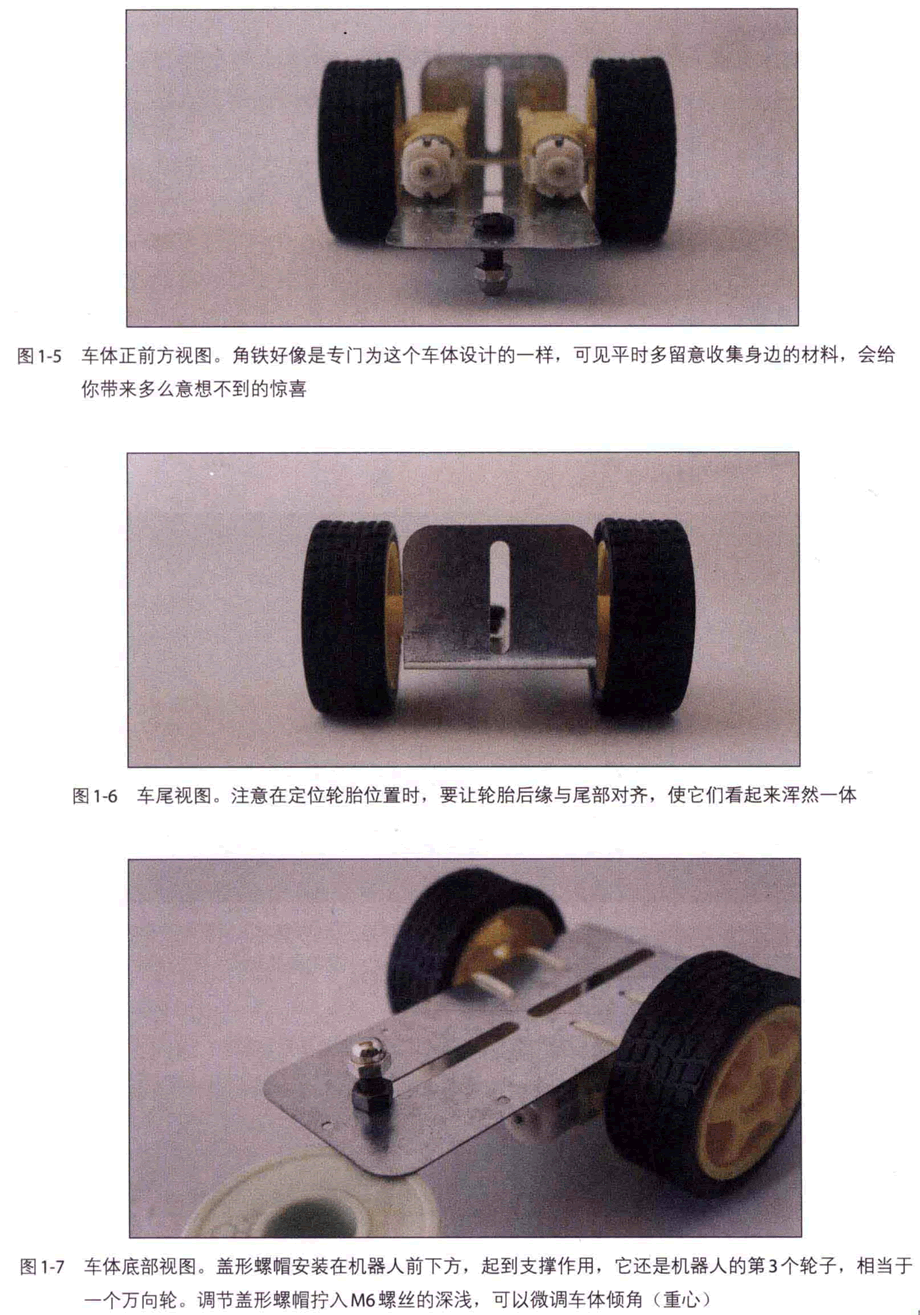
▄ć¾wĄ─čb┼õĘĮĘ©╚ńłD1-2~łD1-7╦∙╩ŠĪŻūxš▀ę▓┐╔ęį░lō]äōįņ┴”Ż¼įOėŗĮYśŗĖ³Š½Ū╔Ą─▄ć¾wĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |