į┌ųŪ─▄ųŲįņŅIė“Ż¼ģfū„ÖCŲ„╚╦Ą─æ¬ė├įĮüĒįĮÅVĘ║ĪŻé„ĮyĪ░ŠĆ╔ŽĘ■äš+ŠĆŽ┬ŠS ūoĪ▒▀\ŠS─Ż╩Įęč¤oĘ©ØMūŃ¼F┤·╣żśIĄ─ąĶŪ¾Ż¼╣”─▄å╬ę╗ĪóųŪ─▄╗»╦«ŲĮĄ═ĪóĒæ欣■║¾Īó ūį╬ęĖ³ą┬┬²Ą╚å¢Ņ}Ż¼ī¦ų┬▀\ŠSą¦┬╩Ą═Ž┬Ż¼Ž▐ųŲ┴╦ÖCŲ„╚╦╝╝ąg║═ŽÓĻPįOéõĄ─ŠSūo░lš╣║═Ų¾śIĄ─╔·«aą¦┬╩ĪŻ
ĘĮ░ĖśŗĮ©┴╦╗∙ė┌ģfū„ÖCŲ„╚╦Ą─OTAŻ©Over The AirŻ®ųŪ╗█Ę■äšŲĮ┼_Ż¼š¹║ŽįŲ ėŗ╦ŃĪó┤¾öĄō■Īó╬’┬ōŠW║═╚╦╣żųŪ─▄Ą╚╝╝ągŻ¼ų╝į┌═╗ŲŲé„Įy▀\ŠS─Ż╩ĮĄ─Ž▐ųŲŻ¼╠ß╣® ČÓ├µĄ─▒O┐žĪóį\öÓĪó▀\ŠS║═Ę┬šµĘ■䚯¼īŹ¼F▀h│╠ųŪ─▄╗»▒O┐žĪó╣╩šŽŅA£y┼cį\öÓĪó ╚½┴„│╠▀\ŠS╣▄└Ē║═╠ōöMĘ┬šµĄ╚ŠC║Ž╣”─▄ĪŻ▀@▓╗āHĮŌøQ┴╦é„Įy─Ż╩ĮŽ┬Ę■äš╣”─▄å╬ę╗Īó ųŪ─▄╗»╦«ŲĮĄ═Ą─å¢Ņ}Ż¼▀Ćėąą¦╠ßĖ▀┴╦Ēææ¬╦┘Č╚Ż¼į÷ÅŖ▀\ŠSĄ─ųŪ─▄╗»║═ūįäė╗»╦«ŲĮĪŻ ŲĮ┼_į┌ÖCŲ„╚╦Ą─▀\ąą▀^│╠ųą▀MąąīŹĢr▒O┐žŻ¼╝░Ģr░l¼FØōį┌å¢Ņ}▓ó▀MąąŅAŠ»Ż¼ £╩┤_ŅA£yįOéõĄ─ĮĪ┐ĄĀŅørŻ¼╠ßŪ░▓╔╚ĪŠSūo┤ļ╩®ĪŻį┌┤╦╗∙ĄA╔ŽŻ¼ŲĮ┼_▓╔ė├ūį╬ęīW┴Ģ ║═▀M╗»ÖCųŲŻ¼ā×╗»ūį╔ĒĄ─ŠSūo╣”─▄Ż¼£p╔┘ī”¼Fł÷ŠSūoĄ─ę└┘ćĪŻ
«aŲĘ▓╗āH─▄Ę■äšå╬ę╗ŲĘ┼ŲĄ─ÖCŲ„╚╦Ż¼▀Ć─▄╝µ╚▌ČÓéĆŲĘ┼Ų║═ą═╠¢Ą─įOéõŻ¼╠ß╣®Įyę╗Ą─╣▄└Ē║═Ę■äšĮė┐┌Ż¼╠ß╔²š¹éĆ«aśIµ£Ą─Ę■äš─▄┴”Ż¼×ķÖCŲ„╚╦«aśIµ£╠ß╣®Ė³╝ėĖ▀ą¦Īó┐╔┐┐Ą─ŠSūoĘĮ░ĖŻ¼×ķ╬┤üĒųŪ─▄▀\ŠS╝╝ągĄ─░lš╣ĄņČ©łįīŹ╗∙ĄAĪŻ
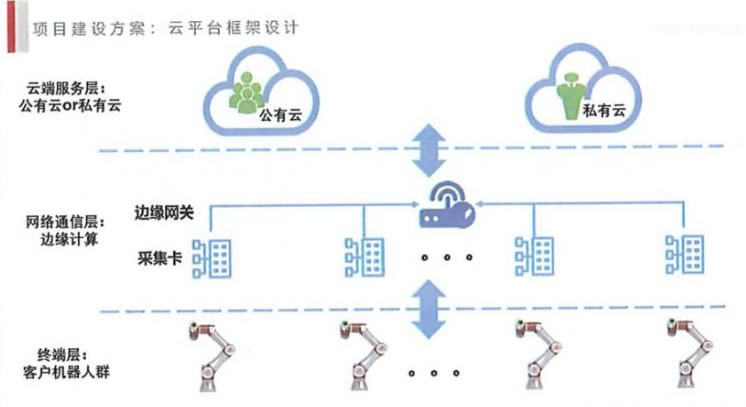
ĒŚ─┐Ą─Į©įOĘĮ░Ė░³└©įŲŲĮ┼_┐“╝▄įOėŗĪóūįų·║═ųŪ─▄Ę■䚥─ķ_░lŻ¼ęį╝░╚╦ÖCĮ╗╗źĄ─ā×╗»Ż¼Š▀¾w╚ńŽ┬Ż║
1. įŲŲĮ┼_┐“╝▄įOėŗ
▓╔ė├Ī░╣½ėąįŲ+╦ĮėąįŲ+▀ģŠēėŗ╦ŃĪ▒Ą─╗ņ║ŽįŲ─Ż╩ĮŻ¼ĮY║Ž╣½ėąįŲĄ─ņ`╗ŅąįĪó╦Į ėąįŲĄ─Ė▀ąį─▄ęį╝░▀ģŠēėŗ╦ŃĄ─Ė▀ą¦ąįŻ¼ØMūŃ▓╗═¼æ¬ė├ł÷Š░Ą─ąĶŪ¾ĪŻĮKČ╦īė═©▀^ 4G/5G ŠWĮj╝╝ągų¦│ųÖCŲ„╚╦╝░ŲõįOéõĄ─┐ņ╦┘Įė╚ļŻ¼┤_▒ŻĒśĢ│═©ą┼ĪŻĘ■äšīėžōž¤║╦ ą─śIäš▀ē▌ŗĄ─╠Ä└ĒŻ¼░³└©öĄō■“×ūCĪó╠Ä└Ē║═śIäš┴„│╠┐žųŲĪŻæ¬ė├īėų▒ĮėĘ■äšė├æ¶Ż¼ ╠ß╣®ČÓśė╗»Ą─┐═æ¶Č╦║═Ę■äšŲ„╣”─▄Ż¼ØMūŃė├æ¶ąĶŪ¾ĪŻ
2. ūįų·║═ųŪ─▄Ę■äšķ_░l
iLink ╗ź═©╗ź┬ōŻ║═©▀^╣żśIŠWĻP▓╔╝»▓óŅA╠Ä└ĒÖCŲ„╚╦▀\ąąģóöĄ║═ŁhŠ│öĄō■Ż¼ ę²╚ļ▀ģŠēėŗ╦ŃŻ¼£p╔┘öĄō■é„▌öĢrķgŻ¼╠ßĖ▀╠Ä└Ē╦┘Č╚║═£╩┤_ąįĪŻ┤╦╣”─▄ų¦│ų▀h│╠▒O ┐žŻ¼▓┘ū„╚╦åT┐╔ļSĢr▒O┐žÖCŲ„╚╦ĀŅæBŻ¼▓ó╝░ĢrĒææ¬╣╩šŽĪŻ
iForecast ŅA£yąįŠSūoŻ║═©▀^į┌ÖCŲ„╚╦ĻPµI▓┐╝■░▓čbé„ĖąŲ„Ż¼īŹĢr╩š╝»£žČ╚Īó š±äėĪóļŖ┴„Ą╚öĄō■Ż¼▓ó└¹ė├┤¾öĄō■╝╝ąg▀MąąĘų╬÷Ż¼ŅA£yÖCŲ„╚╦ąį─▄═╦╗»║═╣╩šŽ─Ż ╩ĮŻ¼╠ß╣®įńŲ┌╣╩šŽį\öÓ║═ŠSūoėŗäØĪŻ═©▀^ČÓ─┐ś╦ā×╗»─Żą═Ż¼ŲĮ║ŌŠSūo│╔▒Š║═▀\ąą ą¦┬╩Ż¼┤_▒ŻZąĪ│╔▒ŠŽ┬Z┤¾įOéõ┐╔┐┐ąįĪŻ
iMGT ╚½┴„│╠▀\ŠSŻ║▓╔ė├ų¬ūR“īäėĄ─öĄō■Ęų╬÷ĘĮĘ©Ż¼ĮY║Ž┴„╩ĮöĄō■╠Ä└Ē║═ČÓ śė╗»öĄō■Į╗╗ź╝╝ągŻ¼ų¦│ųÖCŲ„╚╦╚½╔·├³ų▄Ų┌Ą─öĄō■ūĘ█ÖĪŻ═©▀^īŹĢr╩š╝»║═┐ņ╦┘╠Ä └Ē┤¾┴┐öĄō■Ż¼╝░Ģr░l¼F«É│Ż▓ó╠ß╣®ā×╗»øQ▓▀ų¦│ųŻ¼┤_▒ŻÖCŲ„╚╦ŽĄĮyĄ─ĘĆČ©▀\ąąĪŻ iStudio ╠ōöMĘ┬šµŻ║└¹ė├ 3D Į©─Ż╝╝ągŻ¼ī”ÖCŲ„╚╦║═╣żū„ŁhŠ│▀MąąĮ©─ŻŻ¼┤_▒Ż ─Żą═┼c¼FīŹ╩└Įńę╗ų┬ĪŻ═©▀^Į©┴ó╠žš„ÄņŻ¼ų¦│ųĘ┬šµķ_░lĄ─£╩┤_ąįŻ¼▓ó╠ß╣®ė├æ¶Č© ųŲĄ─Ę┬šµł÷Š░Ż¼┤_▒Ż▓┘ū„Ą─░▓╚½ąį║═ėąą¦ąįĪŻ
3. ā×╗»╚╦ÖCĮ╗╗źĘĮ╩Į
įOėŗ║åØŹų▒ė^Ą─ iService Įń├µŻ¼ų¦│ų PC Č╦║═ęŲäėČ╦įLå¢Ż¼║Ł╔wįOéõ▒O┐žĪó ╣╩šŽį\öÓĪóŠSūoĮ©ūhĪóöĄō■Ęų╬÷Ą╚─ŻēKĪŻ┐╝æ]ė|┐ž▓┘ū„Ą─▒Ń└¹ąį║═ PC Č╦Ą─ą┼Žó š╣╩ŠŻ¼ķ_░löĄō■Įė┐┌īŹ¼F┼c SCADA ║═ MES ŽĄĮyĄ─¤o┐p▀BĮėĪŻ└¹ė├┤¾öĄō■║═ÖCŲ„īW┴Ģ╝╝ągĘų╬÷öĄō■Ż¼ūRäeįOéõ«É│ŻŻ¼ŅA£y╣╩šŽŻ¼▓ó╠ß╣®ųŪ─▄ŠSūoĮ©ūhĪŻ═©▀^┤¾ ─Żą═Įė┐┌▀Mąą╔ŅČ╚īW┴ĢŻ¼│ų└mā×╗»Ęų╬÷─Żą═Ż¼╠ß╔²ė├涾w“×ĪŻ
ŠC╔Ž╦∙╩÷Ż¼═©▀^ŲĮ┼_Ą─┐“╝▄įOėŗĪóūįų·╝░ųŪ─▄Ę■䚥─ķ_░lęį╝░╚╦ÖCĮ╗╗źĄ─ā× ╗»Ż¼įōĒŚ─┐śŗĮ©┴╦ę╗éĆ║Ł╔wÖCŲ„╚╦▒O┐žĪóį\öÓĪó▀\ŠS║═Ę┬šµĄ╚ČÓ╣”─▄Ą─ųŪ╗█Ę■äš ŲĮ┼_ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |